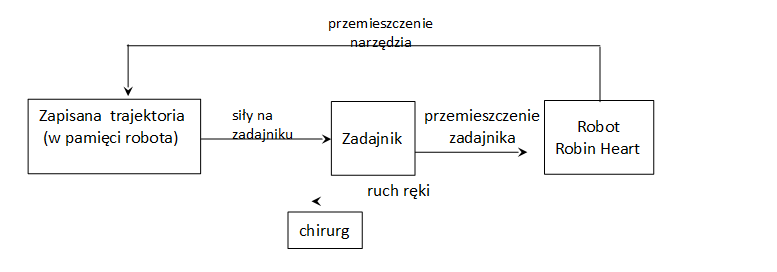
Aktualnie trwają badania nad wprowadzeniem ścisłej współpracy między chirurgiem a robotem. Polega ona na tym, że robot ma „wgrane” do pamięci układu sterowania pewne „ruchy”, jakie kiedyś chirurg wykonał i uznał, że mogą mu się w przyszłości przydać (np. wiązanie nici, ruchy związane z szyciem, czy też cięciem tkanki). To pozwoli na wywołanie z pamięci robota w czasie operacji zadanych czynności. Niestety z uwagi na zmienność ciała człowieka, robot sam tych ruchów nie wykona w sposób bezpieczny, dlatego układ sterowania jest tak skonstruowany, że generuje siły na zadajniku (rysunek 1), trzymanym przez chirurga. Siły te są zawsze skierowane do trajektorii, więc nie „popychają” ręki chirurga, aby szybciej wykonać czynność, lecz delikatnie kierują rękę tak, aby narzędzie przeszło po optymalnym torze.
Hola, hola - coś tu jest nie tak. Albo każdy pacjent jest inny „do pierwszej operacji” (anegdota z poprzedniego artykułu nt. robota do golenia) albo coś z tym systemem jest nie tak. Cóż, i tak i nie. Kwintesencja sterowania polega na „delikatnym sugerowaniu optymalnego toru”. Należy to rozumieć w ten sposób, że robot generuje siły na rękę chirurga, lecz są one tak małe, że chirurg z łatwością może im przeciwdziałać. Z drugiej strony są one na tyle duże, że chirurg będzie je wyczuwał. Teraz to tylko od niego będzie zależał, czy narzędzie będzie przemieszczało się po torze zapisanym w układzie sterowania, czy ten tor będzie zmodyfikowany i dostosowany do ciała człowieka.
Czy to już pierwszy etap autonomii robotów chirurgicznych? Moim zdaniem jeszcze nie, gdyż bez wiedzy i doświadczenia chirurga, robot sam nic nie zdziała. Z drugiej jednak strony robot może wpływać na przebieg operacji. Cóż, pozostaje jednak zasięgnąć opinii filozofów, jak takie sterowanie nazwać.
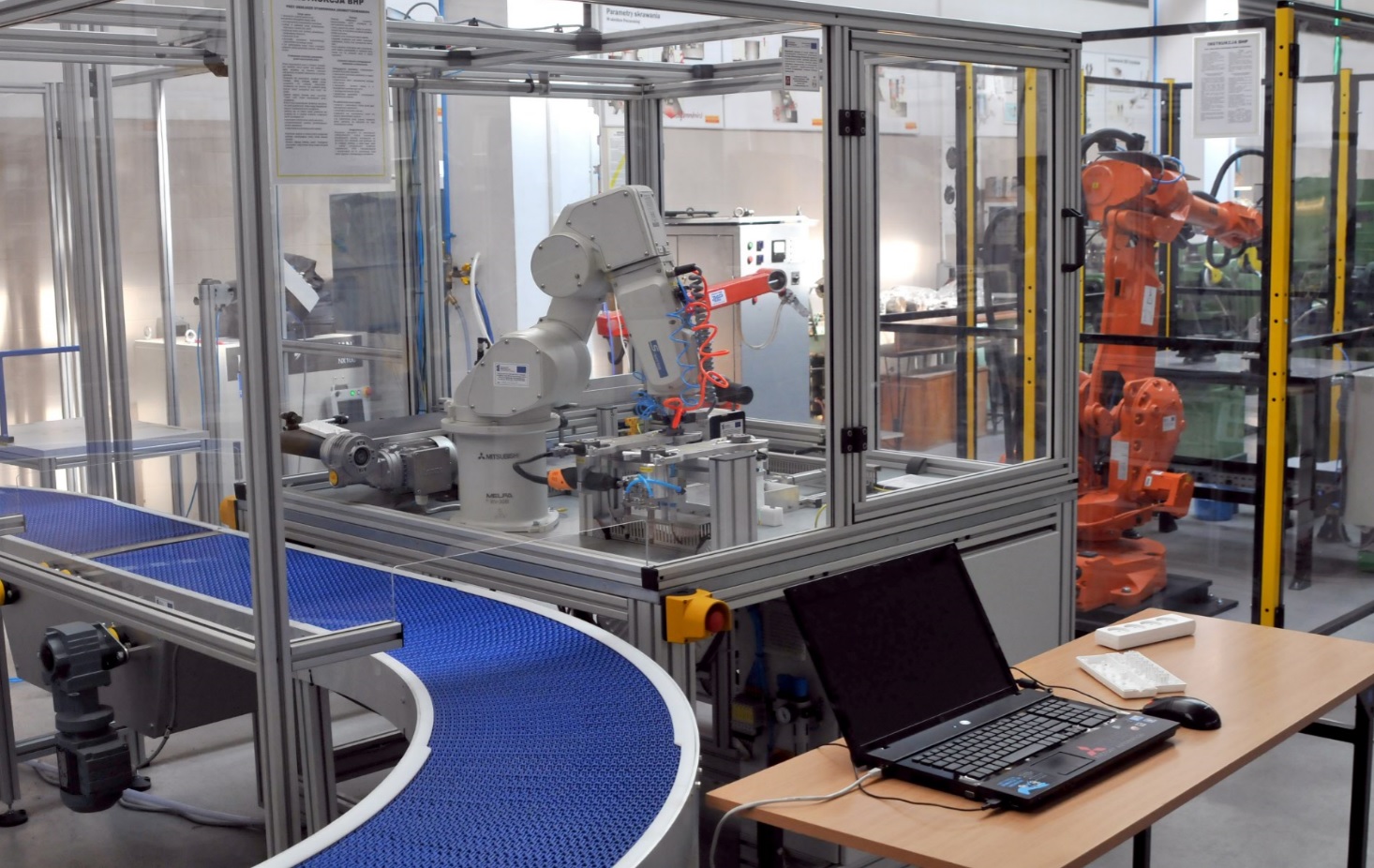
Warto jeszcze dodać, że dla osób zainteresowanych robot Robin Heart znajduje się na wyposażeniu pracowni robotów medycznych w Instytucie Obrabiarek i Technologii Budowy Maszyn. Można się z nim zapoznać w ramach przedmiotu obieralnego roboty medyczne i montażowe lub też w ramach studiów II stopnia na kierunku automatyka i robotyka na Wydziale Mechanicznym, na które serdecznie zapraszam.